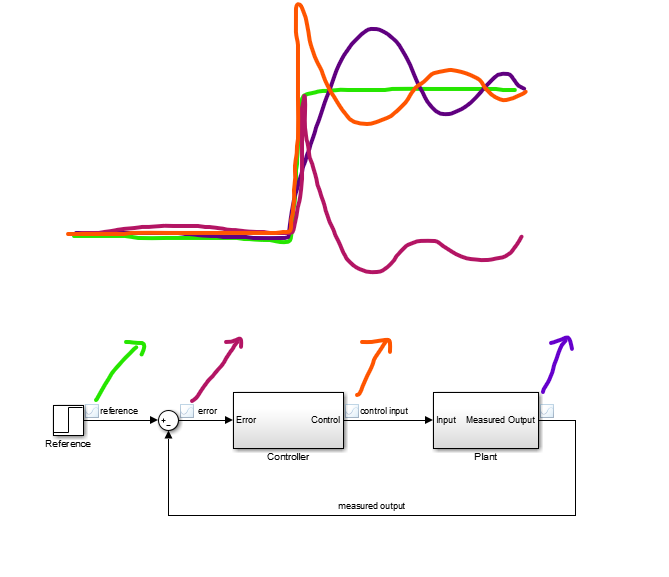
1. Reference(예: 내가 원하는 모션 프로파일)를 제어기에 넣어준다
2. Plant에 Control input이 가해지고 measured output이 나오면(처음에 measured output이 0), reference와 measured output의 차이인 error를 제어기에 다시 넣어준다.
3. PID 제어기는 비례(P), 적분(I), 미분(D) 제어의 개념을 사용하여 control input 신호을 넣어 plant에 넣어준다. P는 현재 error에 비례해서, I는 누적된 에러에 비례해서, D는 에러의 기울기에 비례해서 reference를 따라갈 수 있게 control input을 생성해 준다.
'CAE > Basic Mechanics' 카테고리의 다른 글
| 시간 영역의 충격 가진이 주파수 영역에서의 모든 주파수 대역 가진이 되는 이유 (2) | 2018.03.13 |
|---|---|
| Spectrum Analysis - The key features of analyzing spectra (0) | 2017.11.30 |
| 내적과 외적 (0) | 2017.11.26 |
| [Youtube로 공부하기] 푸리에 변환과 음의 주파수, 그리고 복소수 (0) | 2017.04.01 |
| [Youtube로 공부하기] 오일러공식 증명(1) - 미분방정식 (0) | 2017.04.01 |
